软件系统
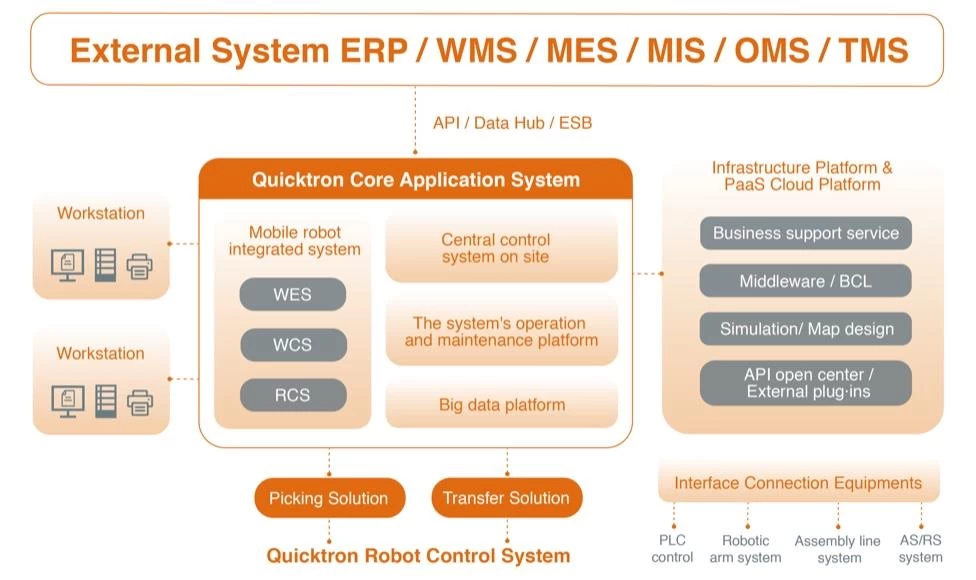
仓库执行系统 / WES
该系统使用实时数据来改进库存存储分配。 此功能使企业能够优化货箱或货架内的 SKU 和货物分配,并根据不断变化的条件进行重新分配。

仓库管理系统 / WCS
我们的仓库管理系统集成了实时数据并提供指令来优化箱子和货架的存储位置,包括拣选、移动、分类并将其存储在存储区域的优化位置。

机器人控制系统 / RCS
我们的机器人控制系统有效控制和协调机器人组件,确保对机器人设备的精确控制。 它通过执行路径规划、交通管理、任务分配、容量优化和安全紧急停止等实时任务来高效管理大规模移动机器人集群。

算法模型
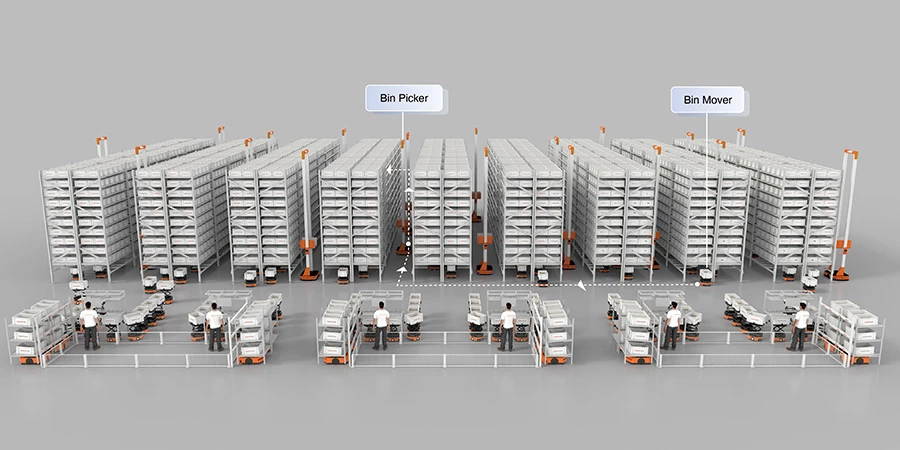
多车协同
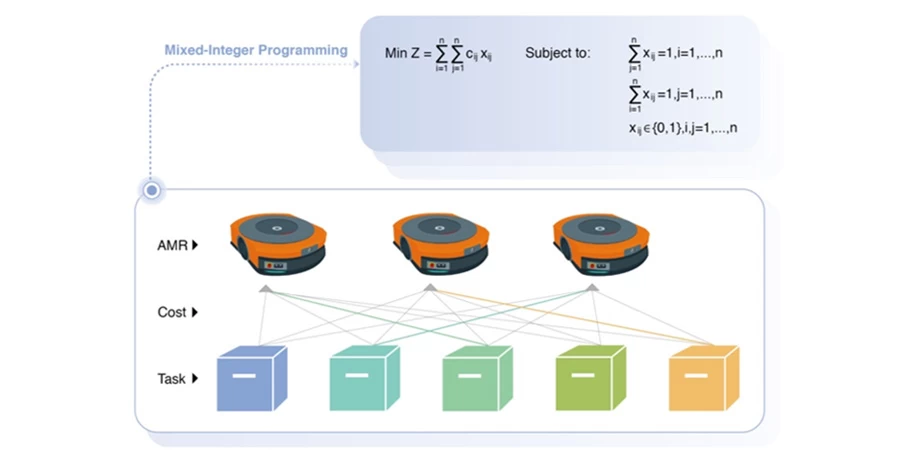
快仓智能算法聚焦多种设备协同解决方案,启发式算法和整数规划精确算法结合的混合算法,料箱到人(QuickBin)场景下料箱机器人和潜伏式机器人的高效协同,智能搬运场景下机器人和提升机的高效协同,为客户提供了更丰富、更经济、更灵活的解决方案。
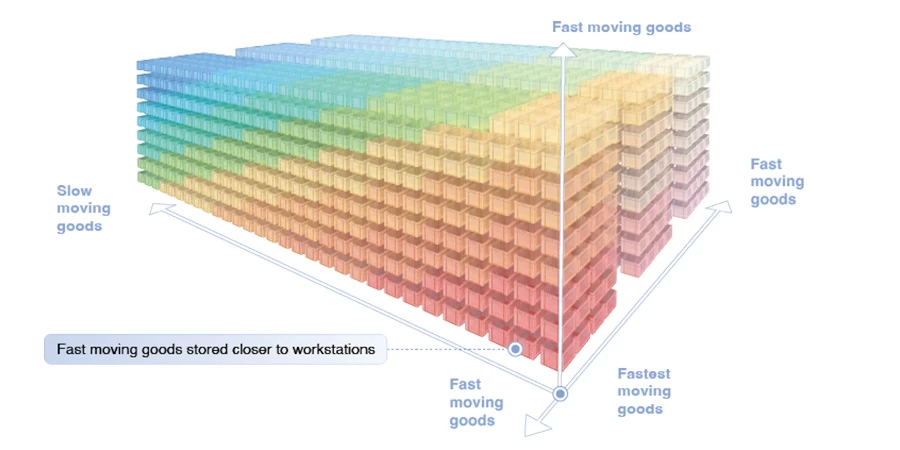
热度移位
基于海量的历史订单数据,对未来的订单需求进行预测,active(定期的)和passive(实时的)热度移位相结合,将货架放到最合理的位置,最小化拣货作业时整体货架搬运距离。从“一仓一策”到“一品一策”,从“一车一策”到“一行一策”,最大化入库、出库效率。
推荐上架
提高单货架品规数量通过对商品尺寸包装的分析及优化,提升存储空间利用率,有效实现了单货架品规存储数量和SKU命中率的大幅提高。出库强关联性商品集中存储系统对出库订单进行大数据分析,对出库关联性强的商品进行系统指导上架,存储到同一个货架同一面,提高货架命中率。
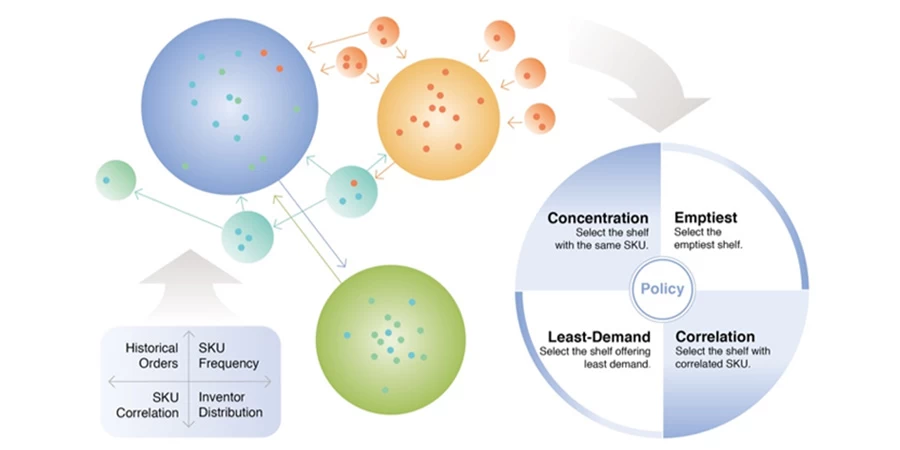

订单组波
基于滚动的历史拣选数据,挖掘不同sku的拣选热度以及sku之间的关联度,基于此进行推荐上架,优化库存分布,既能减少热度商品货架的竞争状态,又能提高后续一次进站拣选效率。
任务分配
货架搬运任务分配AGV时不仅考虑全局的搬运距离,还考虑仓库区域、工作站、任务类型等要素的负载均衡;此外,通过感知作业中的AGV状态,进行动态任务分配及调整,减少AGV绕路和空闲间隔,提升整体作业效率。
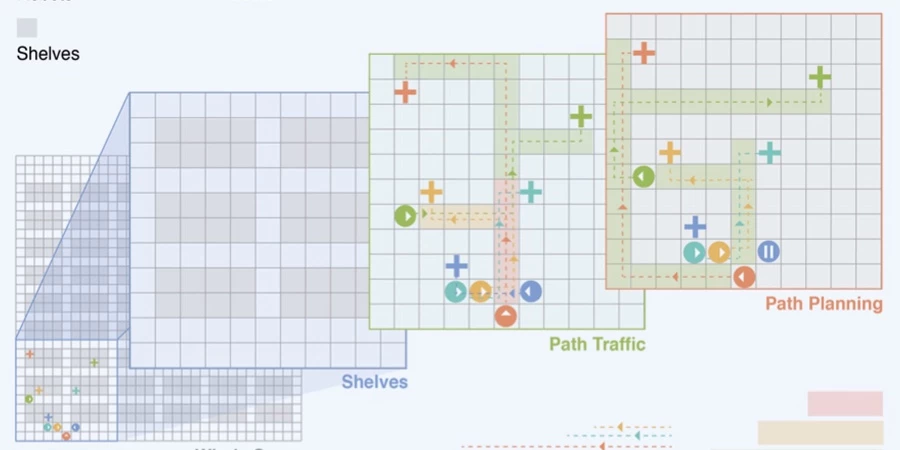
路径规划
在不同导航的多车混场景下,规划全局移动代价最小的最优路径,面对用户误操作产生等异常情况,快速切换至重规划模式,最大化机器人通行效率。